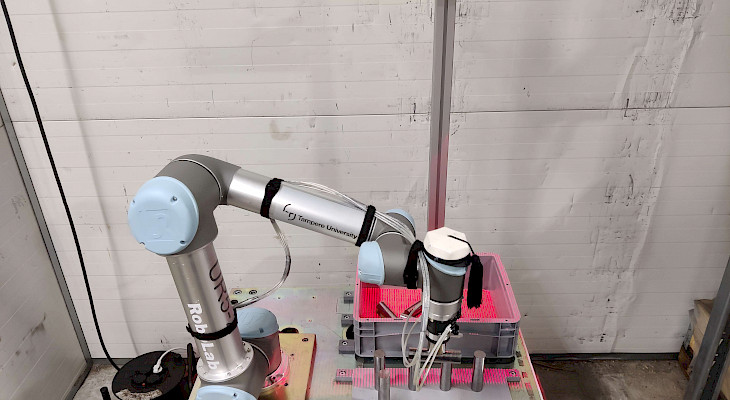
Syvyyskamerateknologiat ovat kehittyneet paljon kuluneiden vuosien aikana, joka on herättänyt paljon keskustelua niiden käyttömahdollisuuksista. Kustannusten alenemisen, sekä paremman saatavuuden myötä konenäön käyttö, erityisesti kasasta poimintasovelluksissa onkin lisääntynyt nopeasti. Automatisoitu kasasta poiminta kuitenkin omaa teknisiä haasteita, jotka ovat läsnä lukuisissa teollisissa prosesseissa. Motivaatio automatisoidun kasasta poiminnan taustalla on tuotettavuuden kasvu, jonka konenäkö mahdollistaa tarjoamalla dataa robotin ympäristöstä.
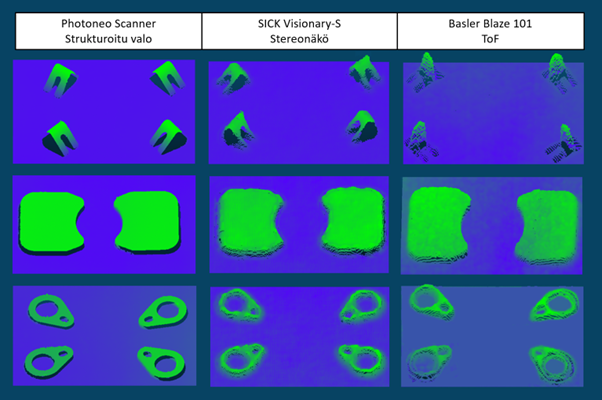
Tämä päivitys pyrkii esittelemään erilaisten syvyyskamerateknologioiden vahvuuksia sekä heikkouksia. Syvyyskameroiden toimintaa arvioidaan erilaisissa ympäristöissä sekä erilaisilla kappaleilla, jonka perusteella 3D-kuvaustekniikoiden suorituskykyä vertaillaan keskenään. Vertailu tehdään strukturoidun valon, stereonäön, sekä Time-of-Flight tekniikoiden välillä. Arvioinnin pääkategoriat ovat ympäristön valoisuus, geometristen muotojen havainnointikyky, sekä heijastavat pinnat. Syvyyskameroiden välinen vertailu rajoittuu läpinäkymättömiin kappaleisiin, jotka vaihtelevat kiiltävistä metalliaihioista mattapintaisiin liitinkomponentteihin ja huokoisiin pintarakenteisiin.

Tulokset
Tutkimuksen tulokset osoittivat, että vaikka kaikki tekniikat kykenevät automatisoituun kasasta poimintaan, strukturoitu valo suoriutui tutkituista teknologioista parhaiten pienten & keskisuurten kappaleiden tapauksessa. Kasasta poimintasovelluksen tarkkuuden arviointi havainnollisti myös sen monia haasteita, sekä kuinka sovelluksen todellinen tarkkuus ei riipu ainoastaan syvyyskameran resoluutiosta. Kun otetaan huomioon onnistuneen kasastapoiminnan vaatimukset, strukturoidulla valolla oli selviä etuja stereonäköön ja ToF verrattuna. Strukturoidulla valolla pystyttiin toimimaan monipuolisesti monien pintatyyppien sekä monenlaisten heijastavien pintojen kanssa. Pilottimittakaavan tulosten perusteella strukturoidun valon pidempi laskenta-aika ei ollut ongelma, ja se ylitti reaaliaikaisen suorituskyvyn tuomat edut.
Suuri syy tälle oli teollisen kasastapoiminnan korkeat vaatimukset kappaleiden paikoittamisesta, joka perustuu poimittavan kappaleen tarkkaan sijaintiin. Robotin liikeratojen laskenta sekä kappaleen poiminta- asento ovat riippuvaisia korkealaatuisesta pistepilvi- datasta, jonka syvyyskamerat tuottavat konenäköjärjestelmälle.
|
Teknologia |
Vahvuudet |
Heikkoudet |
| Time-of-Flight | Pystyy reaaliaikaiseen kuvantamiseen, mikä mahdollistaa kasastapoiminnan lyhyellä sykliajalla. Soveltuu kasastapoimintaan, mutta sopii parhaiten suurten kohteiden paikantamiseen pitkillä etäisyyksillä. Parhaiden suoriutuva teknologia vahvassa ympäristön valoisuudessa. | Verrattain alhaisempi resoluutio kuin stereonäössä ja strukturoidussa valossa. Kuperat, heijastavat pinnat ovat ongelmallisia |
| Stereonäkö | Pystyy reaaliaikaiseen kuvantamiseen, mikä mahdollistaa kasastapoiminnan lyhyellä sykliajalla. Laaja valikoima erilaisia kameroiden resoluutioita mahdollistaa erilaiset kasastapoimintasovellukset erilaisilla etäisyyksillä. Värikamera mahdollistaa myös kasastapoimintasovelluksen perustuen kappaleiden väriin | Tasaiset, yhdenmukaiset pinnat voivat olla ongelmallisia ja aiheuttaa vastaavuusongelman. Kuperat, lähes peilikirkkaat pinnat myös ongelmallisia. |
| Strukturoitu valo | Korkea resoluutio mahdollistaa pientenkin kohteiden poiminnan, ja on paras tekniikka lähimittauksiin. Monipuolinen monille erilaisille pintarakenteille ja parhaiten toimiva tekniikka heijastavilla pinnoilla. | Pienempi kantama verrattuna stereonäköön ja ToF. Kohtauksen skannaaminen vie jonkin aikaa, mikä edellyttää kappaleiden olevan paikoillaan. |
Linkki diplomityöhön:
Comparative analysis of 3D- depth cameras in industrial bin picking solution, Partanen, Aleksi (2023)
Aiheesta myös Tampereen yliopiston YouTube-kanavalla:
Metalliaihioiden kasastapoiminta bin-picking järjestelmällä
https://www.youtube.com/watch?v=dduSmOhWYpc&t=2s
Kasastapoiminta eli bin picking sovellus robotilla
https://www.youtube.com/watch?v=S0lMBJi0v2o
Liitinkomponenttien sekapoiminta
https://www.youtube.com/watch?v=Ml9W8bJ9yIg
3D Syvyyskameran kalibrointi
https://www.youtube.com/watch?v=hdG4pZlqlwA&t=5s
Kategoriat: Konenäkö
Ole ensimmäinen kommentoija
Kirjoita kommentti