

Yksi kasastapoiminnan haasteista juontuu teollisista, alati muuttuvista ympäristötekijöistä. Tämä ympäristö vastaa harvoin laboratorio- olosuhteita, ja konenäköjärjestelmän toimintaa voi heikentää esimerkiksi lämpötilamuutokset tai poikkeamat käsiteltävissä kappaleissa. Tämä päivitys käsittelee mallipohjaisen kasastapoiminnan toimintaa konepalvelussa, jossa käsiteltävät metalliaihiot voivat sisältää jäämiä leikkuuöljystä tai metallilastuista. Nämä ovat ongelmallisia, koska öljy voi aiheuttaa heijastuksia, tai metallilastut voivat häiritä mallipohjaisen järjestelmän toimintaa.
Tulokset
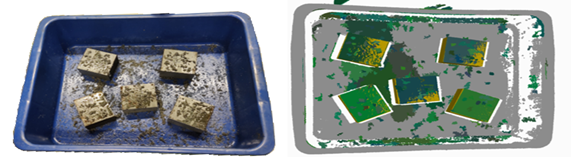
Tulokset osoittivat, että strukturoituun valoon perustuva konenäköjärjestelmä kykenee toimimaan ulkoisten häiriöiden kanssa hyvin. Pieni määrä öljyä tai metallilastuja ei vaikuttanut negatiivisesti järjestelmän toimintaan. Syvyyskameran korkean resoluution ja järjestelmän lokalisointialgoritmien ansiosta, pystyttiin referenssimalli edelleen yhdistämään syvyyskameran tuottamaan pistepilveen. Öljyn aiheuttamat heijastukset tai metallilastut eivät vaikuttaneet tuloksiin, kunhan paikallistettavan kappaleen pinnan ominaisuuspiirteet olivat edelleen tunnistettavissa.
Järjestelmän toiminnassa havaittiin kuitenkin ongelma, joka täytyy huomioida kokonaismittaisen sovelluksen toteuttamisessa. Magneettiset metallilastut kerääntyivät ajan kuluessa magneettiin, joka lopulta esti magneetin ja poimittavan kappaleen välisen kontaktin. Lastukerroksen saavutettua tarpeeksi paksun kerroksen, ei magneetti enää onnistunut tarttumaan poimittavaan kappaleeseen. Sovelluksessa, jossa esiintyy metallihiutaleita, tarvitaan järjestelmä, jolla tarttuja pidetään puhtaana. Magneettisten tarttujien tapauksessa tämä voitaisiin toteuttaa esimerkiksi pneumaattisella ilmalla poimintojen välillä.

Linkki diplomityöhön:
Comparative analysis of 3D- depth cameras in industrial bin picking solution, Partanen, Aleksi (2023)
Aiheesta myös Tampereen yliopiston YouTube-kanavalla:
Metalliaihioiden kasastapoiminta bin-picking järjestelmällä
https://www.youtube.com/watch?v=dduSmOhWYpc&t=2s
Kasastapoiminta eli bin picking sovellus robotilla
https://www.youtube.com/watch?v=S0lMBJi0v2o
Liitinkomponenttien sekapoiminta
https://www.youtube.com/watch?v=Ml9W8bJ9yIg
3D Syvyyskameran kalibrointi
https://www.youtube.com/watch?v=hdG4pZlqlwA&t=5s
Kategoriat: Konenäkö
Ole ensimmäinen kommentoija
Kirjoita kommentti