Tämä päivitys käsittelee strukturoituun valoon perustuvan, mallipohjaisen kasastapoiminnan tarkkuutta. Kasastapoimintasovelluksen tarkkuus on kriittinen osa sovelluksen luotettavuutta, teollisuuden asettamien korkeiden laatuvaatimuksien vuoksi. Mikäli konenäköjärjestelmän tarkkuus ei yksinään riitä vastaamaan näihin vaatimuksiin, tulee tätä kompensoida ulkoisilla järjestelmillä. Kasastapoimintasovelluksen tarkkuus ei koostu yksinomaan järjestelmän kameran resoluutiosta, vaan se on usean osavirheen summa. Tähän lukeutuvat esimerkiksi robotista, sekä robotin tarttujasta aiheutuvat virheet.
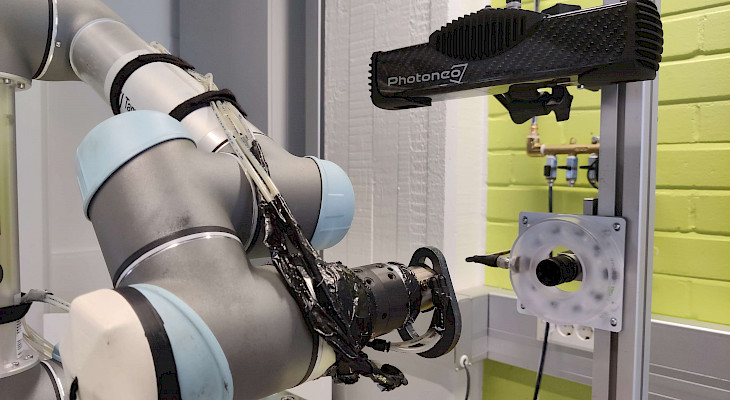
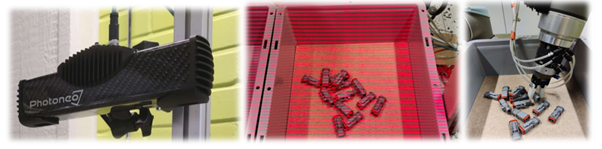
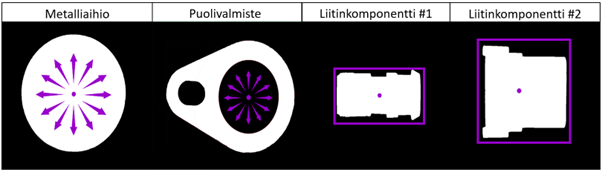
Modernin 3D-teknologiaan perustuvan mallipohjaisen kasastapoimintasovelluksen tarkkuutta tutkittiin neljällä erilaisella kappaleella. Järjestelmän tarkkuuden mittaamiseksi poimittiin kappale robotilla, jonka jälkeen se vietiin ulkoisen kamerajärjestelmän käsiteltäväksi. Kappaleesta otettiin kuva, ja kappaleen poikkeama referenssiasemasta mitattiin.
Tulokset
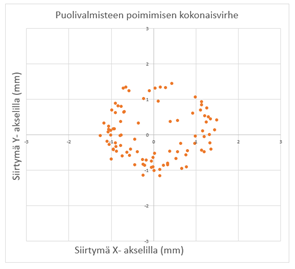
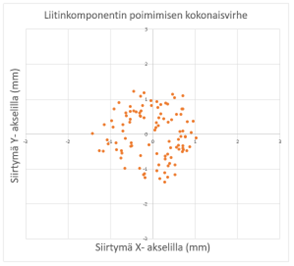
Tutkimukset olivat kaikkien kappaleiden kesken yhtenevät, joissa keskivertopoikkeama poimituilla kappaleella oli +/- 1 mm.
Tutkimuksessa havaittiin myös mallipohjaisten kasastapoimintasovellusten ominaisuuspiirre, jossa monimutkainen kappalegeometria mahdollisti tarkemman paikantamisen kuin yksinkertainen geometria. Tämä perustuu mallipohjaisen kasastapoimintaratkaisun toimintaperiaatteeseen, joka pyrkii etsimään kameran kuvaamasta pistepilvestä vastaavuuksia referenssimalliin. Kun etsittävän kappaleen geometria monimutkaistuu, on järjestelmällä enemmän piirteitä, jotka voidaan yhdistää etsittävään kappaleeseen.
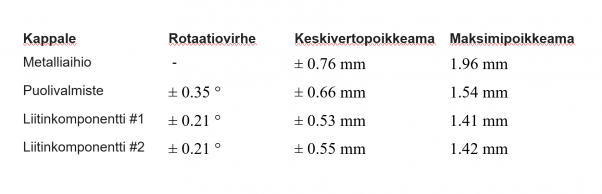
Vaikkakin tutkimuksen syvyyskamera on kykenevä suureen tarkkuuteen, järjestelmä rajoittui käytetyn robottitarttujan puolesta. Käytetyt vakuumi- sekä magneettitarttujat aiheuttivat molemmat kappaleeseen tarttuessa siirtymää, joka esiintyy tuloksissa systemaattisena virheenä referenssipisteestä. Tuloksista nähdään, kuinka korkeata tarkkuutta vaativissa sovelluksissa tarvitaan ulkoista järjestelmää kompensoimaan tämä virhe. Kun ajatellaan esimerkiksi konepalvelua, jonka tarkkuusvaatimukset ovat erittäin korkeat, on tämän järjestelmän kokonaisvirhe liikaa. Tämänkaltainen sovellus edellyttää joko mekaanista paikoittamista, tai siirtymän kompensointia kappaleeseen tarttumisen jälkeen.
 |
|
Linkki diplomityöhön:
Comparative analysis of 3D- depth cameras in industrial bin picking solution, Partanen, Aleksi (2023)
Aiheesta myös Tampereen yliopiston YouTube-kanavalla:
Metalliaihioiden kasastapoiminta bin-picking järjestelmällä
https://www.youtube.com/watch?v=dduSmOhWYpc&t=2s
Kasastapoiminta eli bin picking sovellus robotilla
https://www.youtube.com/watch?v=S0lMBJi0v2o
Liitinkomponenttien sekapoiminta
https://www.youtube.com/watch?v=Ml9W8bJ9yIg
3D Syvyyskameran kalibrointi
https://www.youtube.com/watch?v=hdG4pZlqlwA&t=5s
Ole ensimmäinen kommentoija
Kirjoita kommentti