
Johdanto
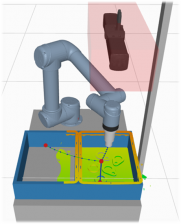
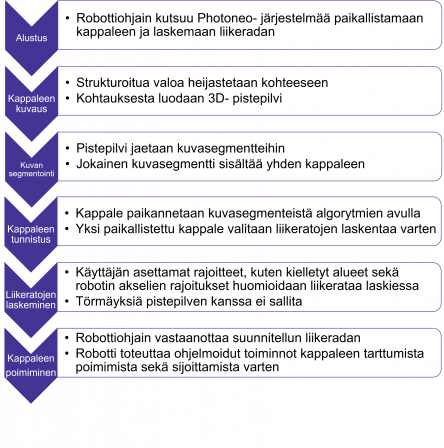
Kasastapoiminta on näköohjatuissa robottijärjestelmissä käytetty menetelmä, jossa poimitaan robotin avulla satunnaisesti aseteltuja kappaleita laatikosta. Tässä postauksessa esitelty demonstraatio on toteutettu Universal Robotics UR5-sarjan robotin sekä Photoneon Bin Picking Studion kanssa. Photoneo-järjestelmän tehtävänä on paikallistaa kappaleet sekä laskea liikeradat robotille, ja robotin tehtävänä on poimia sekä sijoittaa paikallistetut kappaleet.
Strukturoitu valo
Strukturoitu valotekniikka perustuu koodattujen valokuvioiden heijastamiseen kuvattavalle alueelle, joka kuvataan samanaikaisesti valokuvioiden muuttuessa.
Valokuviot on koodattu sekä suunniteltu siten, että kohtauksen jokainen yksittäinen pikseli voidaan yksilöidä sen vastaanottamien heijastuksien perusteella.
Kun kuvatun alueen pikselit on saatu yksilöityä, voidaan näiden kuvapisteiden sijainti kolmiopaikantaa ja esittää 3D- avaruudessa. Tämän avulla voidaan generoida 3D- pistepilvi, jonka avulla voidaan siten paikantaa kappaleita, ja laskea robotin liikeradat.

3D-konenäön tuomat edut
Kolmannen ulottuvuuden lisääminen avaa mahdollisuudet erilaisten sovellusten, kuten kasastapoiminnan, laadunvalvonnan sekä robotin ohjauksen toteuttamiseen. Lisäksi 3D-konenäkö suoriutuu hyvin monissa erilaisissa valaistusolosuhteissa sekä kuvattavan kohteen kontrastista riippumatta.
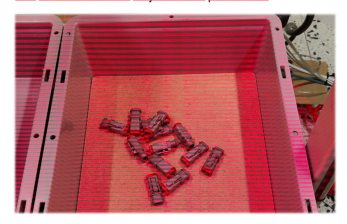
Työskentelusolu
Kasastapoimintasovellus on sijoitettu robotin eteen, jossa kappaleet poimitaan yhdestä laatikosta ja lajitellaan toiseen. 3D-syvyyskamera sijaitsee suoraan poimittavien kappaleiden yläpuolella, jotta koko työskentelyalue voidaan kuvantaa kerralla. Syvyyskamera on Photoneon Phoxi 3D-scanner M, jonka resoluutio on 3.2 MP (2064x1544 px)

Photoneo kasastapoimintaratkaisu
Photoneon kasastapoimintaratkaisu koostuu strukturoituun valoon perustuvasta 3D-skannerista, sekä kontrollerista, joka vastaa kappaleiden tunnistamisesta sekä liikeratojen laskemisesta. Photoneon ratkaisu on “Mallipohjainen”, joka edellyttää tunnistettavien kappaleiden 3D-malleja. Näitä malleja verrataan kuvatun pistepilven sisältöön, josta etsitään vastaavaisuuksia kappaleiden välillä. Tämän seurauksena voidaan kappaleen sijainti sekä orientaatio ratkaista algoritmien avulla.
Linkki diplomityöhön:
Comparative analysis of 3D- depth cameras in industrial bin picking solution, Partanen, Aleksi (2023)
Aiheesta myös Tampereen yliopiston YouTube-kanavalla:
Metalliaihioiden kasastapoiminta bin-picking järjestelmällä
https://www.youtube.com/watch?v=dduSmOhWYpc&t=2s
Kasastapoiminta eli bin picking sovellus robotilla
https://www.youtube.com/watch?v=S0lMBJi0v2o
Liitinkomponenttien sekapoiminta
https://www.youtube.com/watch?v=Ml9W8bJ9yIg
3D Syvyyskameran kalibrointi
https://www.youtube.com/watch?v=hdG4pZlqlwA&t=5s
Kategoriat: Konenäkö
Ole ensimmäinen kommentoija
Kirjoita kommentti